导程是螺母在丝杆上每走一圈的距离。在产品目录中。导程会是我们定义每转前进距离的术语。
导程越大每转一圈的距离就长。导程=节距*螺纹头数
节距是牙与牙之间的距离
在单头的丝杆中节距=导程
在多头螺纹中,节距=导程÷螺纹头数
在给定的丝杆长度上的测量值。
例如:0.004 Inch 每步
导程精度是基于导程得出的实际位置与理论位置的偏差波动。
例如:导程0.5英寸丝杆和导程0.004英寸每英尺精度旋转24次理论上移动螺母12英寸。
然而导程0.004英寸丝杆的每步,实际行程可以从11.996英寸到12.004英寸。
垂直负荷下需要考虑电机失电后的自滑现象,必要时需考虑安装刹车装置以作保护。
垂直负荷下还应将负荷本身重量考虑在负载计算中。水平应用丝杆不能承受悬挂负载。
当电机运行频率接近电机固有震荡频率,就会产生共振,并发出较大的噪音。1.8度步距角的混合式电机共振频率 一般在200PPS 左右。微步驱动可以改善低频共振现象
步进电机需要一些外部电子元件才能运行。这些组件通常包括电源,逻辑程序器,开关组件和时钟脉冲源,以确定步进率。
许多商业上可用的驱动器已经将这些组件集成到一个完整的组件中。
基本的步进驱动器有各种功能,它可以产生高性能。鼎智有多种驱动,以便满足多种应用场合。
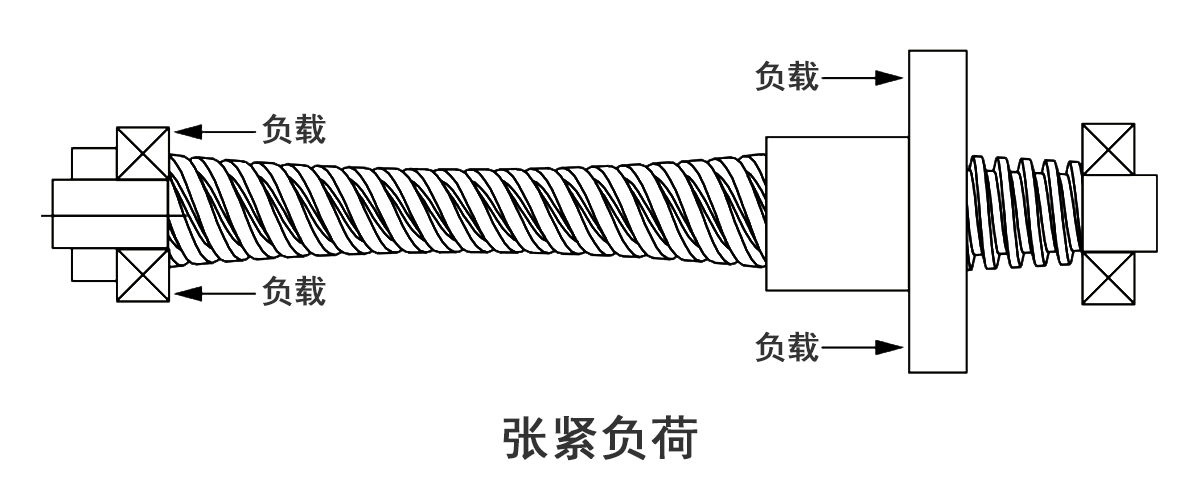
对丝杆具有拉伸作用的负荷为张紧负荷
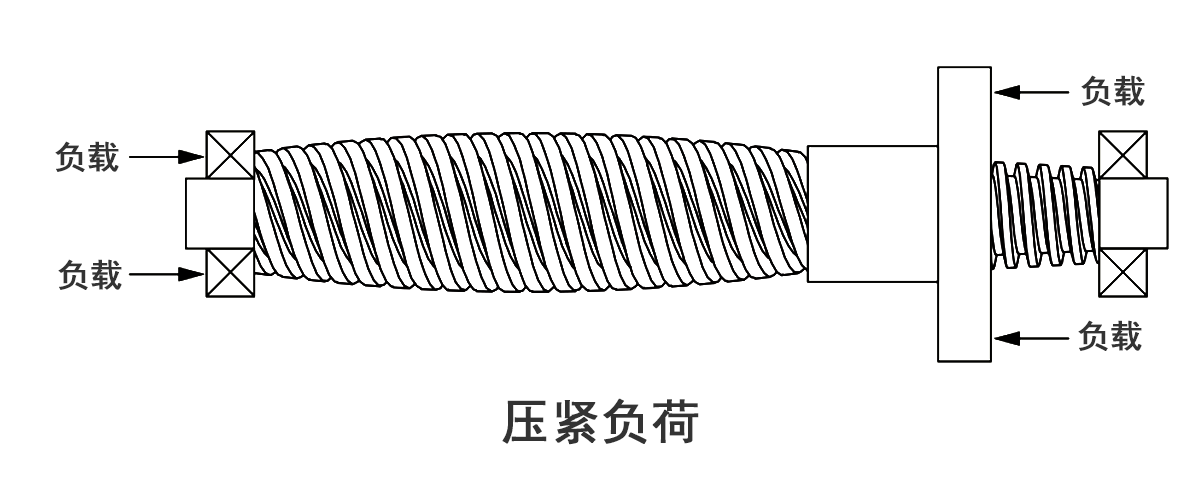
对丝杆具有挤压作用的的负荷为压紧负荷
根据负荷的大小来设计组装丝杆
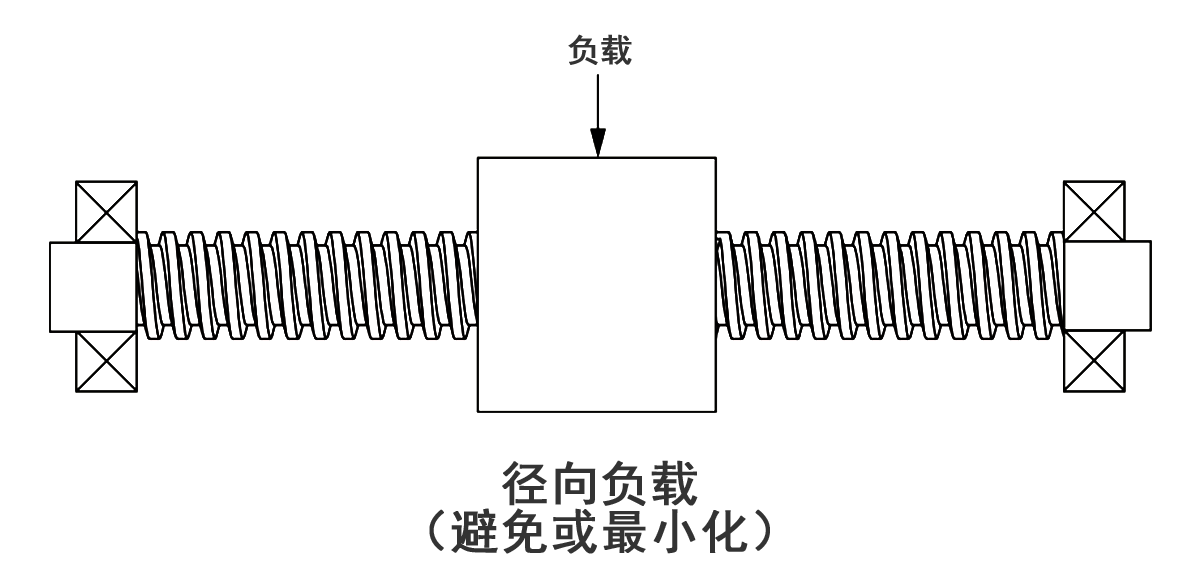
径向负荷是丝杆与丝杆中心轴线垂直的负载
一般情况下避免这也的设计,除非有线性导轨作支撑
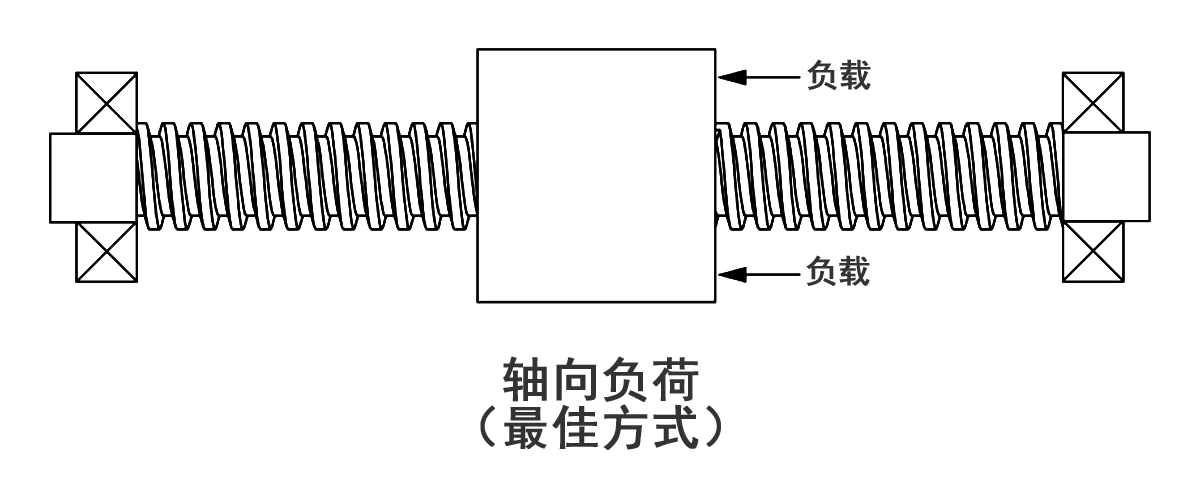
轴向负荷是指与丝杆中心轴线平行的负载
反向驱动力是指轴向施加的可使螺母或丝杆旋转的推拉力。一般来说,丝杆效率大于50%就可能产生反推力,丝杆效率低于35%可自锁。
垂直负荷系统必须考虑自锁(反推力)
驱动丝杆系统需要的力矩包括:
标准公制螺纹或按客户要求定制,具体请与公司的技术支持工程师确认
丝杆系统的性能(速度和效率)受到丝杆端部的附着和支撑方式的影响
| 端部固定方式 | 相对刚度 | 临界速度的因素 | 临界负载的因素 |
|---|---|---|---|
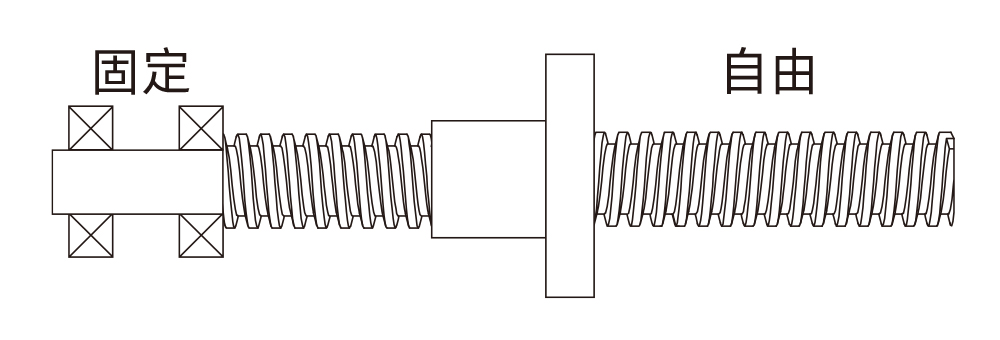 |
弱 | 0.32 | 0.25 |
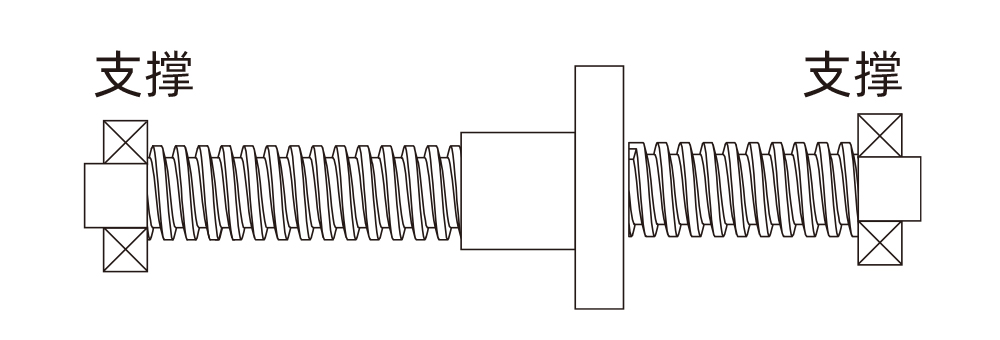 |
中等 | 1.0 | 1.0 |
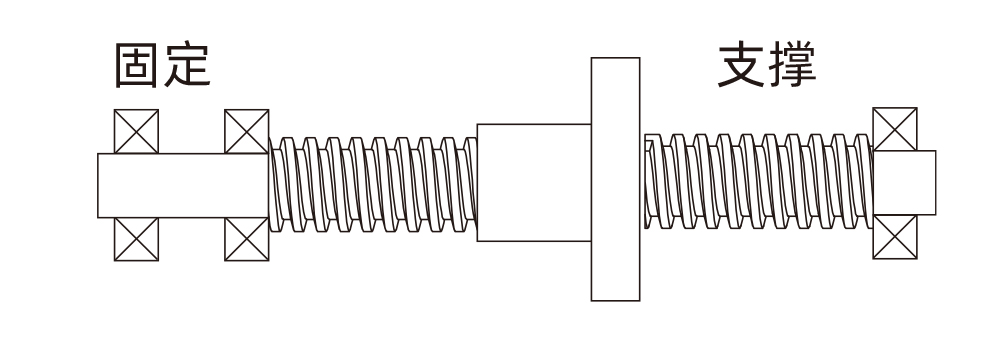 |
较佳 | 1.55 | 2.0 |
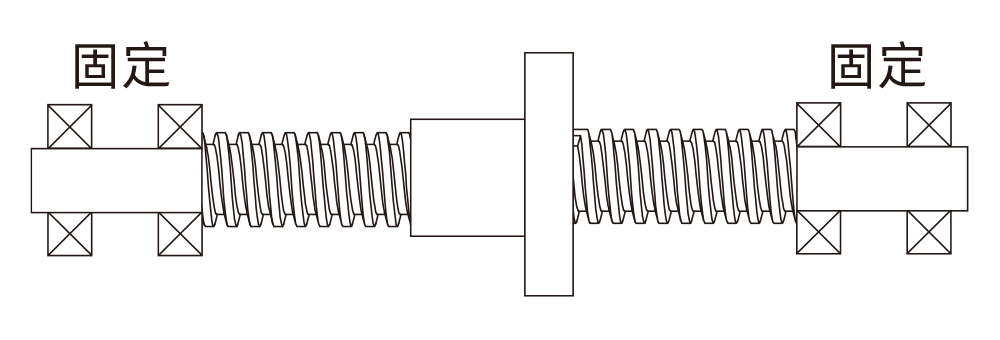 |
最佳 | 2.24 | 4.0 |
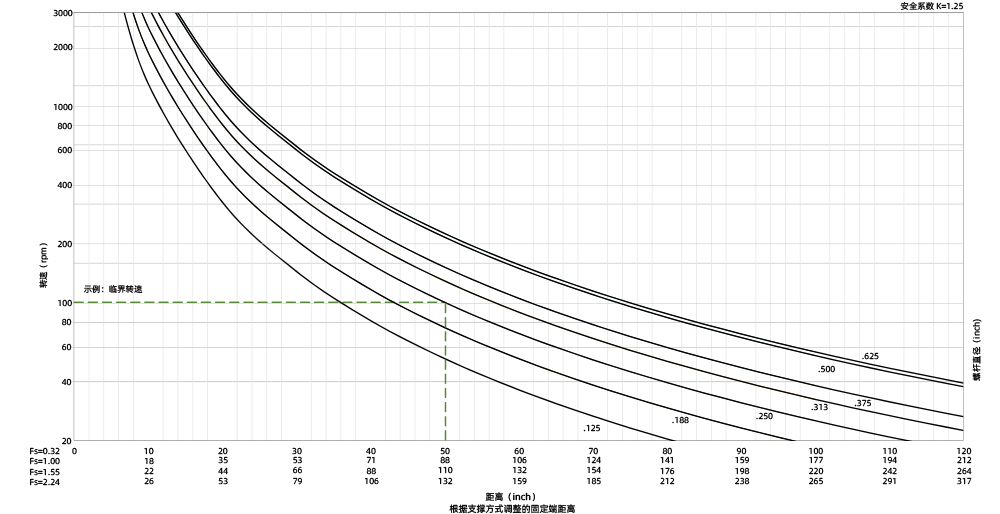
临界速度是指丝杆到达第一次谐振频率时的旋转速度,在这个速度下,丝杆会变形扭曲,系统会振动而变得不稳定。
几个变量会影响系统达到临界速度的速度:
下图的一个示例表示直径19.05mm(0.75inch),长1778mm(70inch)的丝杆在安全系数K=1.25,且Fs=0.32的固定方式下,临界转速为187Rpm。
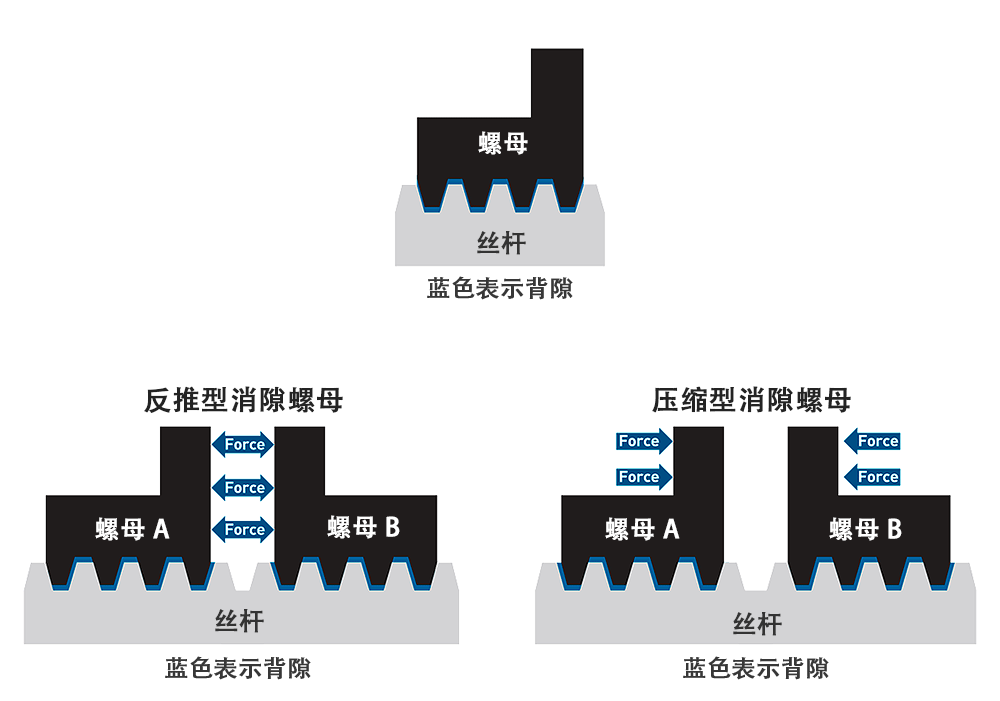
背隙是丝杆和螺母静止时两者轴向的相对可移动量,随着工作时间的增加,由于磨损也会导致背隙增加。
背隙的补偿或校正可由消隙螺母来实现。
当需要双向定位时,消隙是需要被关注的。