▪ 输入电源:DC 24V
▪ 八档电流选择
▪ PWM 恒流双极性细分驱动
▪ 十六档细分选择
▪ 单/双脉冲选择
▪ 光电隔离输入功能
▪ 电机短路保护功能
▪ 设计精巧、噪音低、振动小
| 适配电机 | 适配两相混合式步进电机,最大适配1A(峰值) | ||||
|---|---|---|---|---|---|
| 电源供电 | 24VDC | ||||
| 输出电流 | 0.1A~1.0A/相(峰值) | ||||
| 驱动方式 | 全桥双极性PWM驱动 | ||||
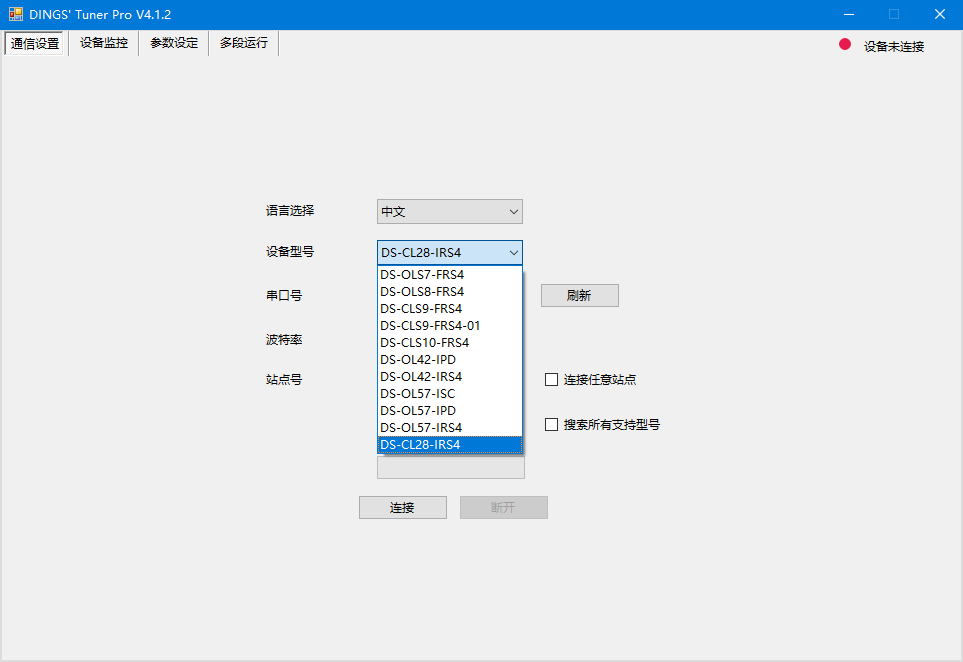
| 控制方式 | RS485总线通讯控制 | ||||
| 编码器支持 | 内置编码器 | ||||
| 输入信号 | 4路通用输入 | 光耦输入电压H=22~26V,L=0~0.8V,导通电流5~8mA | |||
| 输出信号 | 1路通用输出 | 光电隔离输出,最高承受电压30VDC,最大饱和电流10mA | |||
| 使用环境 | 使用场合 | 避免粉尘,油雾及腐蚀性气体 | |||
| 湿度 | <85%RH,无凝露 | ||||
| 温度 | 0~40℃ | ||||
| 散热 | 安装在通风环境中 | ||||

▪ 最高频响:500KHz(占空比 50%)
▪ 支持脉冲模式、内部脉冲模式、I/O 控制、位置下压模式、扭力模式
▪ 3路输入信号:脉冲、方向、脱机(光耦隔离,5V 信号驱动,超过 5V 需加限流电阻)
▪ 1路输出信号:报警(光耦隔离,无报警时有输出)
▪ 保护功能:过流、过压、欠压、电机缺相
| 适配电机 | 适配两相混合式步进电机,最大适配1.5A(峰值) | ||||
|---|---|---|---|---|---|
| 电源供电 | 24VDC | ||||
| 输出电流 | 0.1A~1.5A/相(峰值) | ||||
| 驱动方式 | 全桥双极性PWM驱动 | ||||
| 控制方式 | RS485总线通讯控制 | ||||
| 编码器支持 | 内置编码器 | ||||
| 输入信号 | 3路高速输入 | 光耦输入电压:H=3.5~5V,L=0~0.8V,导通电流6-15mA,输入响应500Khz | |||
| 输出信号 | 报警信号 | 光电隔离输出,最高承受电压30VDC,最大饱和电流10mA | |||
| 使用环境 | 使用场合 | 避免粉尘,油雾及腐蚀性气体 | |||
| 湿度 | <85%RH,无凝露 | ||||
| 温度 | 0~40℃ | ||||
| 散热 | 安装在通风环境中 | ||||


▪ 输入电源:DC24Vdc±10%
▪ 输出额定电流(峰值):0 ~4.8A/相
▪ 集成式42步进闭环控制系统,RS485通讯接口支持MODBUS RTU通讯协议
▪ 7路输入、3路输出
| 适配电机 | 适配两相混合式步进电机,最大适配1.2A(峰值) | ||||
|---|---|---|---|---|---|
| 电源供电 | 24VDC | ||||
| 输出电流 | 最大额定电流1.2A/相(峰值) | ||||
| 驱动方式 | 全桥双极性PWM驱动 | ||||
| 控制方式 | RS485总线通讯控制 | ||||
| 编码器支持 | 内置编码器 | ||||
| 输入信号 | 7路通用输入 | 光耦输入电压H=22~26V,L=0~0.8V,导通电流5~8mA | |||
| 输出信号 | 3路通用输出 | 光电隔离输出,最高承受电压30VDC,最大饱和电流10mA | |||
| 使用环境 | 使用场合 | 避免粉尘,油雾及腐蚀性气体 | |||
| 湿度 | <85%RH,无凝露 | ||||
| 温度 | 0~40℃ | ||||
| 散热 | 安装在通风环境中 | ||||
In a mobile environment, you can move left and right to see the contents (tables).
| 驱动器型号 | DS-OL42-ICAO | DS-OL42-IRS4(IPD) | |||
|---|---|---|---|---|---|
| 适配电机 | 适配两相混合式步进电机,最大适配3.0A(峰值) | ||||
| 驱动电源供电 | 24V~36VDC | ||||
| 输出电流 | 0.5A~3.0A/相(峰值) | ||||
| 驱动方式 | 全桥双极性PWM驱动 | ||||
| 控制方式 | CANopen总线控制 | 脉冲方向控制/RS485总线通讯控制 | |||
| 编码器支持 | 否 | ||||
| 输入信号 | 4路通用输入 光耦输入电压H=5V,L=0~0.8V 导通电流6~15mA |
2路高速输入 光耦输入电压H=3.5~26V,L=0~0.8V 导通电流5~8mA,输入响应200Khz |
|||
| 2路通用输入 光耦输入电压H=5V,L=0~0.8V 导通电流5~8mA |
|||||
| 输出信号 | 1路通用输出 | 光电隔离输出,最高承受电压30VDC,最大饱和电流10mA | |||
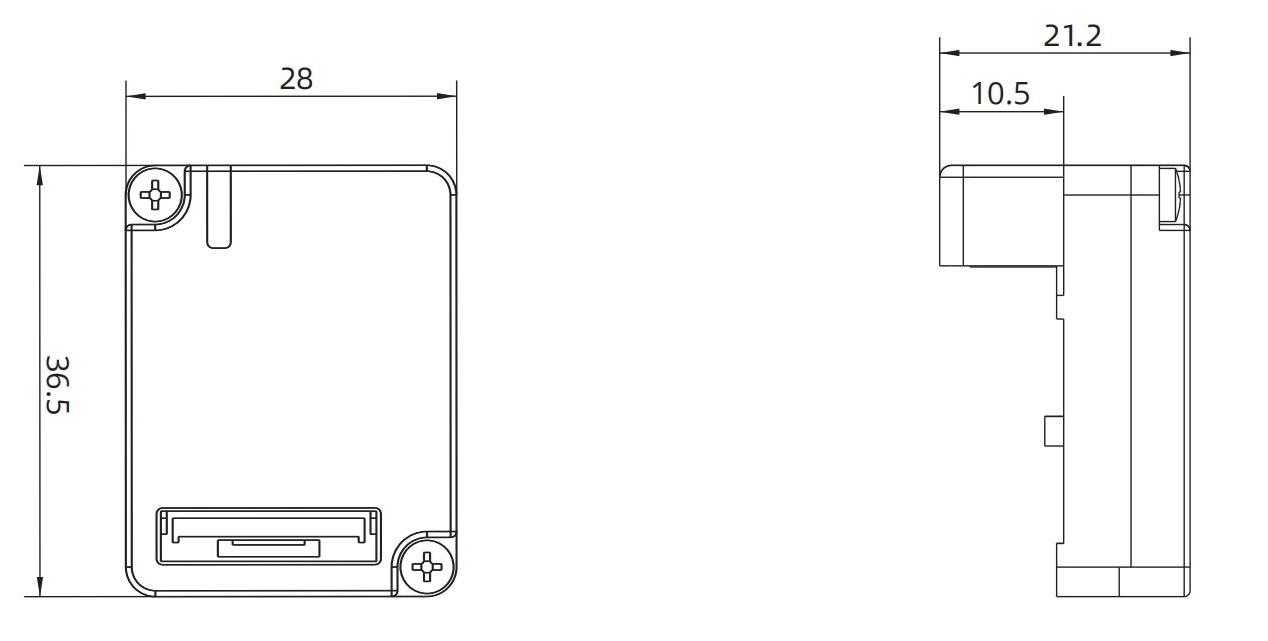
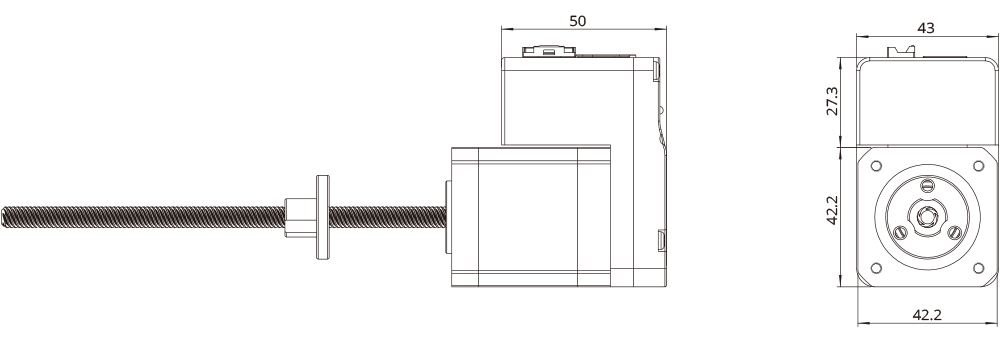
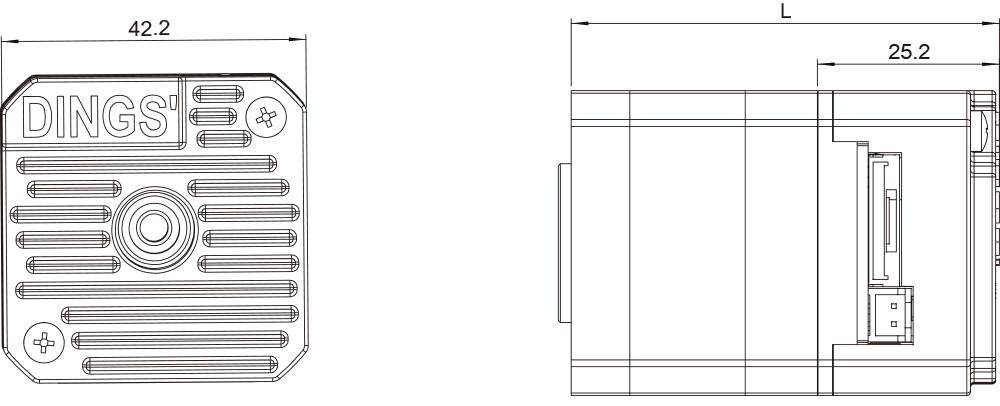
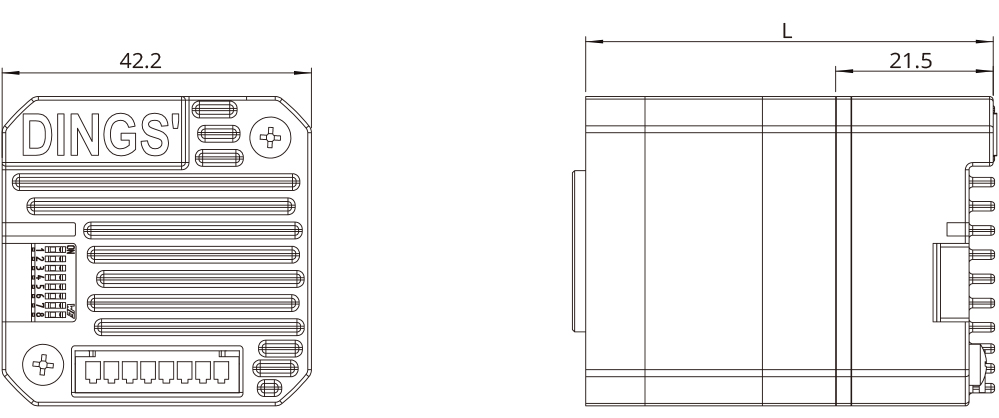
| 尺 寸 | 42.2x42.2x25.2mm | ||||
| 重 量 | 60g | ||||
| 使用环境 | 使用场合 | 避免粉尘,油雾及腐蚀性气体 | |||
| 湿 度 | < 85 % RH, 无凝露 | ||||
| 温 度 | 0°C - 40°C | ||||
| 散 热 | 安装在通风环境中 | ||||
*1 当控制模式为外部模式时,端口IN1 IN2为高速脉冲口
*2 IN3 IN4输入电压为5V,当IN1 IN2输入电压与IN3 IN4输入电压不同时,请勿将PIN5端口与IN1 IN2共地
*3
由于驱动与电机一体连接,实际使用中电机温度会传导给驱动,我们建议实际应用中,电机稳定工况下的温度不应高于55℃,过高的温度,可能会导致驱动芯片的损坏
*4 在温度较高的环境中,建议外部增加散热装置
In a mobile environment, you can move left and right to see the contents (tables).
| 适配电机 | 适配两相混合式步进电机,最大适配2.2(峰值) | ||||
|---|---|---|---|---|---|
| 电源供电 | 24VDC | ||||
| 输出电流 | 0.3~2.2A/相(峰值) | ||||
| 驱动方式 | 全桥双极性PWM驱动 | ||||
| 控制模式 | 脉冲方向控制 | ||||
| 编码器支持 | 否 | ||||
| 输入信号 | 脉冲信号 | 光耦输入电压:H=3.5~5V,L=0~0.8V,导通电流6~15mA,输入响应500Khz | |||
| 方向信号 | |||||
| 脱机信号 | |||||
| 使用环境 | 使用场合 | 避免粉尘,油雾及腐蚀性气体 | |||
| 湿度 | <85%RH,无凝露 | ||||
| 温度 | 0~40°C | ||||
| 散热 | 安装在通风环境中 | ||||

In a mobile environment, you can move left and right to see the contents (tables).
| 驱动器型号 | DS-OL57-ICAO | DS-OL57-IRS4(IPD) | DS-OL57-ISC | |
|---|---|---|---|---|
| 适配电机 | 适配两相混合式步进电机,最大适配5.6A(峰值) | |||
| 驱动电源供电 | DC 24V~48V | |||
| 输出电流 | 0.5A~5.6A/相(峰值) | |||
| 驱动方式 | 全桥双极性PWM驱动 | |||
| 控制方式 | CANopen总线控制 | 脉冲方向控制/RS485总线通讯控制 | 模拟量输入控制 | |
| 输入信号 | 4路通用输入 光耦输入电压 H=3.5~5V,L=0~0.8V, 导通电流5~8mA |
2路高速输入 光耦输入电压 H=3.5~26V,L=0~0.8V, 导通电流5~8mA |
3路高速输入 光耦输入电压 H=3.5~5V,L=0~0.8V, 导通电流5~8mA,输入响应200Khz |
|
| 2路通用输入 光耦输入电压 H=3.5~5V,L=0~0.8V, 导通电流5-8mA |
模拟量输入 接10K电位器或0~5V模拟量调节 |
|||
| 输出信号 | 光电隔离输出,最高承受电压30VDC,最大饱和电流10mA | |||
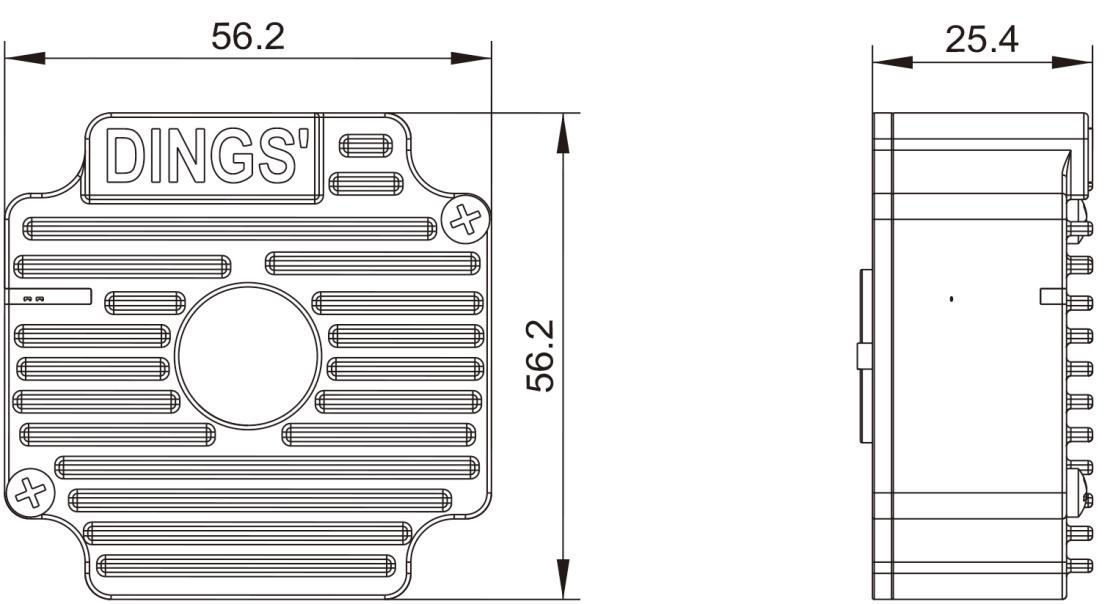
| 尺 寸 | 56.2x56.2x25.4mm | |||
| 重 量 | 60g | |||
| 使用环境 | 使用场合 | 避免粉尘,油雾及腐蚀性气体 | ||
| 湿 度 | < 85 % RH, 无凝露 | |||
| 温 度 | 0°C - 40°C | |||
| 散 热 | 安装在通风环境中 | |||